【STM32】HAL库 STM32CubeMX教程十四 |
您所在的位置:网站首页 › spi最大传输速率 csdn › 【STM32】HAL库 STM32CubeMX教程十四 |
【STM32】HAL库 STM32CubeMX教程十四
|
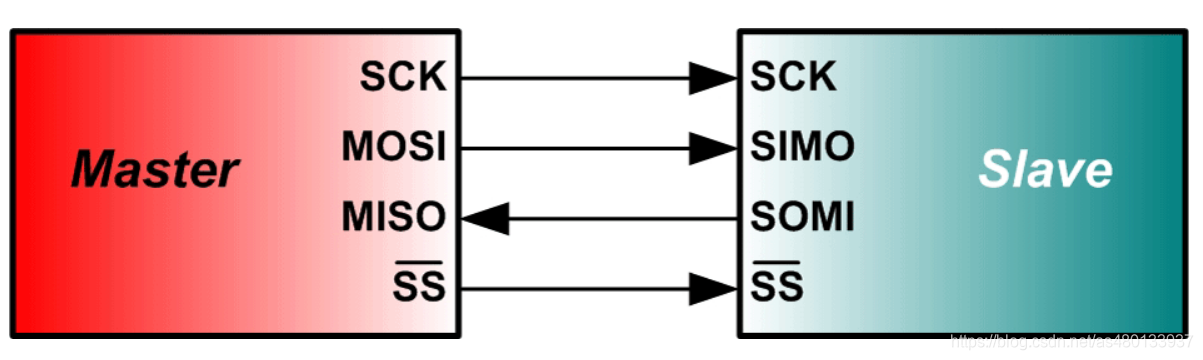
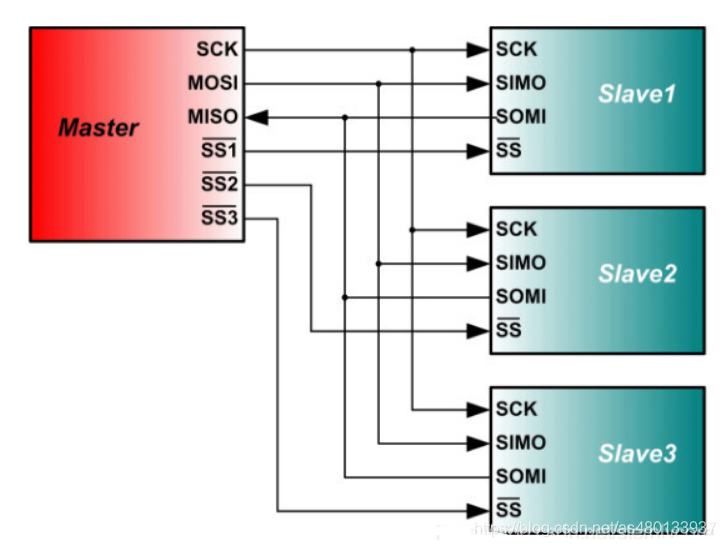
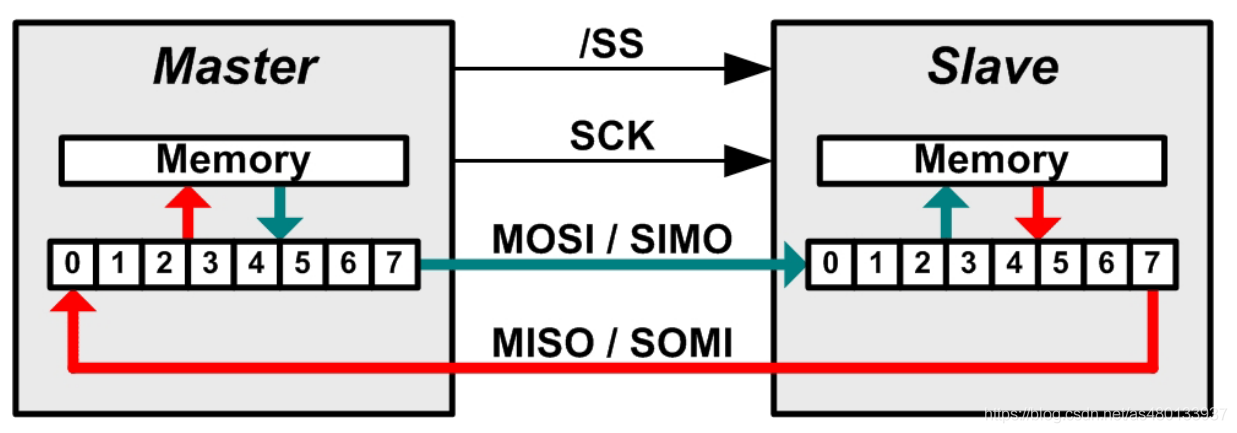
前言: 本系列教程将HAL库与STM32CubeMX结合在一起讲解,使您可以更快速的学会各个模块的使用 在我们的HAL库中,对硬件SPI函数做了很好的集成,使得之前SPI几百行代码,在HAL库中,只需要寥寥几行就可以完成 那么这篇文章将带你去感受下它的优异之处,这些优异的函数,也正是HAL库的优点所在 本文 1首先讲解SPI工作原理及W25QX芯片原理,2基于CubeMx创建工程 3 对HAL库SPI函数进行讲解,4例程详解 所用工具: 1、芯片: STM32F103ZET6 2、STM32CubeMx软件 3、IDE: MDK-Keil软件 4、STM32F1xx/STM32F4xxHAL库 5、SPI: 使用硬件SPI1 知识概括: 通过本篇博客您将学到: SPI的基本原理 STM32CubeMX创建SPI例程 HAL库SPI函数库 什么是SPISPI 是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola(摩托罗拉)首先在其MC68HCXX系列处理器上定义的。 SPI,是一种高速的,全双工,同步的通信总线,并且在芯片的管脚上只占用四根线,节约了芯片的管脚,同时为PCB的布局上节省空间,提供方便,主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。 SPI主从模式SPI分为主、从两种模式,一个SPI通讯系统需要包含一个(且只能是一个)主设备,一个或多个从设备。提供时钟的为主设备(Master),接收时钟的设备为从设备(Slave),SPI接口的读写操作,都是由主设备发起。当存在多个从设备时,通过各自的片选信号进行管理。 SPI是全双工且SPI没有定义速度限制,一般的实现通常能达到甚至超过10 Mbps SPI信号线SPI接口一般使用四条信号线通信: SDI(数据输入),SDO(数据输出),SCK(时钟),CS(片选) MISO: 主设备输入/从设备输出引脚。该引脚在从模式下发送数据,在主模式下接收数据。MOSI: 主设备输出/从设备输入引脚。该引脚在主模式下发送数据,在从模式下接收数据。SCLK:串行时钟信号,由主设备产生。CS/SS:从设备片选信号,由主设备控制。它的功能是用来作为“片选引脚”,也就是选择指定的从设备,让主设备可以单独地与特定从设备通讯,避免数据线上的冲突。硬件上为4根线。 SPI一对一 SPI一对多 SPI主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。 首先拉低对应SS信号线,表示与该设备进行通信主机通过发送SCLK时钟信号,来告诉从机写数据或者读数据 这里要注意,SCLK时钟信号可能是低电平有效,也可能是高电平有效,因为SPI有四种模式,这个我们在下面会介绍主机(Master)将要发送的数据写到发送数据缓存区(Menory),缓存区经过移位寄存器(0~7),串行移位寄存器通过MOSI信号线将字节一位一位的移出去传送给从机,,同时MISO接口接收到的数据经过移位寄存器一位一位的移到接收缓存区。从机(Slave)也将自己的串行移位寄存器(0~7)中的内容通过MISO信号线返回给主机。同时通过MOSI信号线接收主机发送的数据,这样,两个移位寄存器中的内容就被交换。
根据时钟极性(CPOL)及相位(CPHA)不同,SPI有四种工作模式。 时钟极性(CPOL)定义了时钟空闲状态电平: CPOL=0为时钟空闲时为低电平CPOL=1为时钟空闲时为高电平时钟相位(CPHA)定义数据的采集时间。 CPHA=0:在时钟的第一个跳变沿(上升沿或下降沿)进行数据采样。CPHA=1:在时钟的第二个跳变沿(上升沿或下降沿)进行数据采样。
关于SPI简单介绍到这里,详细讲解请参看: 《SPI原理超详细讲解—值得一看》 W25Q128 FLASH芯片介绍W25Q128是一款SPI通信的FLASH芯片,可以通过标准/两线/四线SPI控制,其FLASH的大小为16M,分为 256 个块(Block),每个块大小为 64K 字节,每个块又分为 16个扇区(Sector),每个扇区 4K 个字节。通过SPI通信协议即可实现MCU(STM32)和 W25Q128 之间的通信。实现W25Q128的控制需要通过SPI协议发送相应的控制指令,并满足一定的时序。 原理图连接
写使能(Write Enable) (06h)
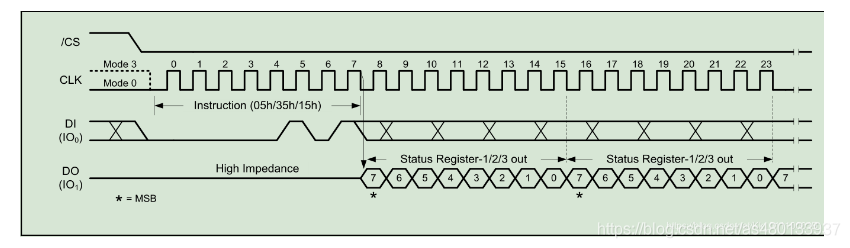
向FLASH发送0x06 写使能命令即可开启写使能,首先CS片选拉低,控制写入字节函数写入命令,CS片选拉高。 扇区擦除指令(Sector Erase) (0x20h) 读命令(Read Data) (03h) 读数据指令可从存储器依次一个或多个数据字节,该指令通过主器件拉低/CS电平使能设备开始传输,然后传输“03H”指令,接着通过DI管脚传输24位地址,从器件接到地址后,寻址存储器中的数据通过DO引脚输出。每传输一个字节地址自动递增,所以只要时钟继续传输,可以不断读取存储器中的数据。 状态读取命令(Read Status Register) 读状态寄存器1(05H),状态寄存器2(35H),状态寄存器3(15H) 写入命令0x05,即可读取状态寄存器的值。 写入命令(Page Program) (02h)
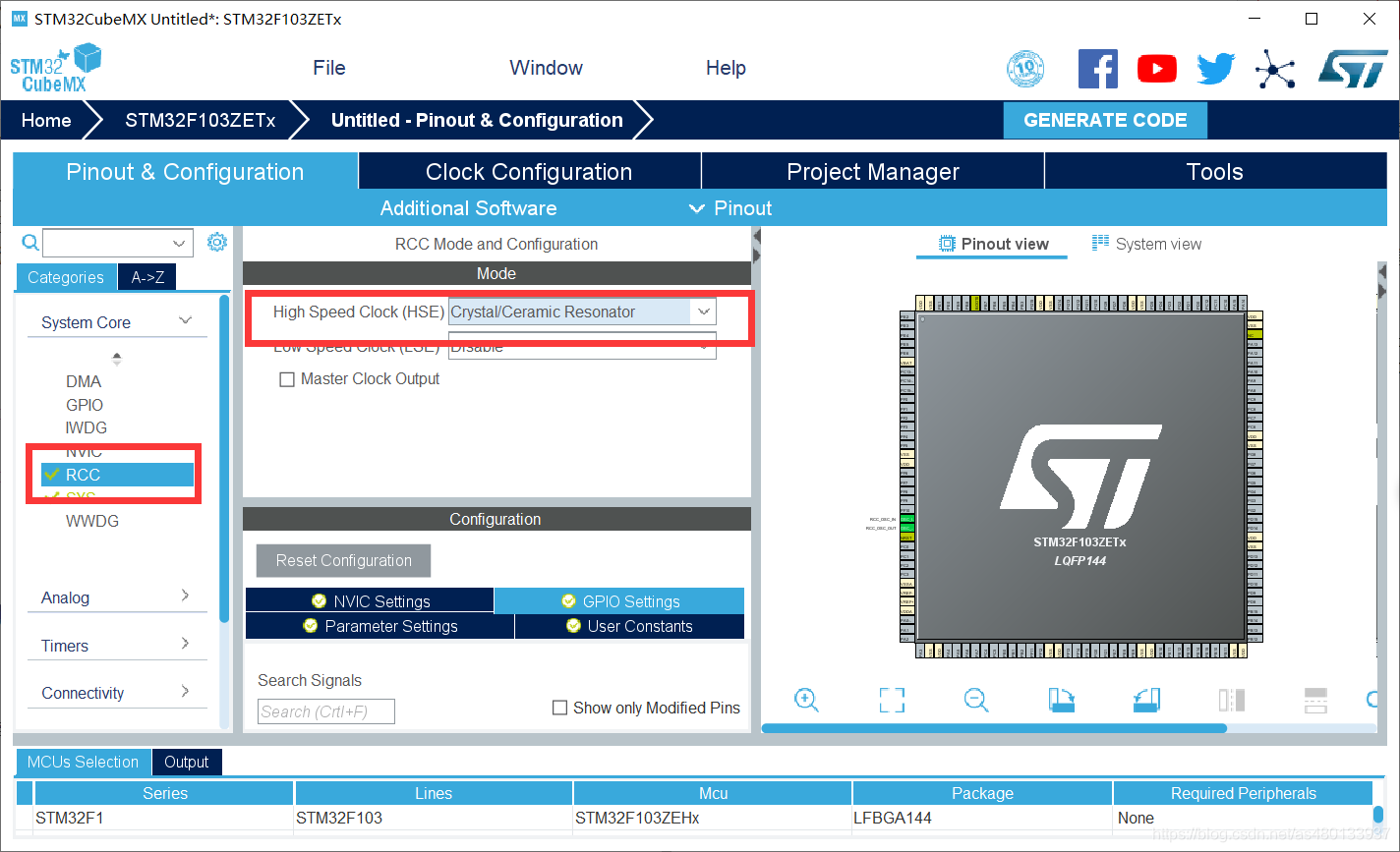
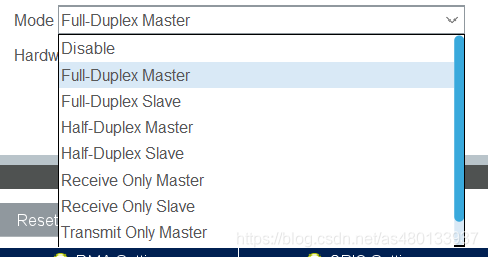
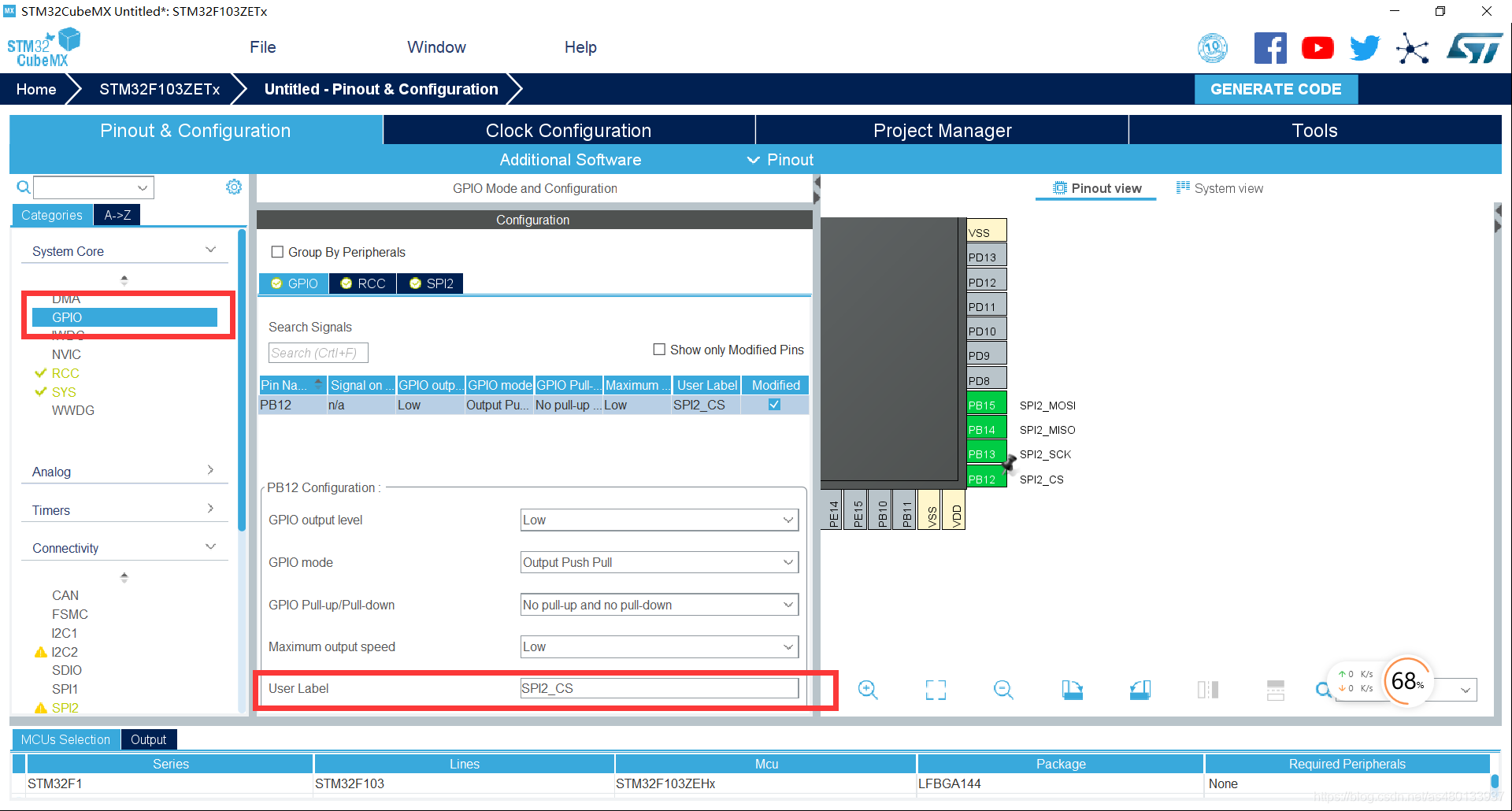
在对W25Q128 FLASH的写入数据的操作中一定要先擦出扇区,在进行写入,否则将会发生数据错误。 W25Q128 FLASH一次性最大写入只有256个字节。 在进行写操作之前,一定要开启写使能(Write Enable)。 当只接收数据时不但能只检测RXNE状态 ,必须同时向发送缓冲区发送数据才能驱动SCK时钟跳变。 基于CubeMx的讲解1设置RCC时钟 设置高速外部时钟HSE 选择外部时钟源 2 SPI设置 SPI2设置为全双工主模式,硬件NSS关闭,如下图:
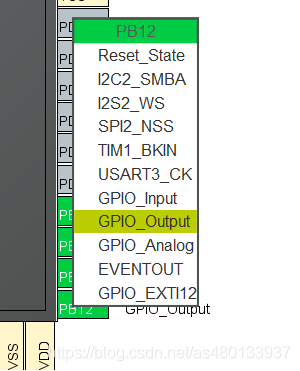
因为我们是和W25Q128V芯片闪存芯片进行通信,所以设置为主机全双工 不使能硬件NSS STM32有硬件NSS(片选信号),可以选择使能,也可以使用其他IO口接到芯片的NSS上进行代替 其中SIP1的片选NSS : SPI1_NSS(PA4) 其中SIP2的片选NSS : SPI2_NSS(PB12) 如果片选引脚没有连接 SPI1_NSS(PA4)或者SPI2_NSS(PB12),则需要选择软件片选 NSS管脚及我们熟知的片选信号,作为主设备NSS管脚为高电平,从设备NSS管脚为低电平。当NSS管脚为低电平时,该spi设备被选中,可以和主设备进行通信。在stm32中,每个spi控制器的NSS信号引脚都具有两种功能,即输入和输出。所谓的输入就是NSS管脚的信号给自己。所谓的输出就是将NSS的信号送出去,给从机。 对于NSS的输入,又分为软件输入和硬件输入。 软件输入: NSS分为内部管脚和外部管脚,通过设置spi_cr1寄存器的ssm位和ssi位都为1可以设置NSS管脚为软件输入模式且内部管脚提供的电平为高电平,其中SSM位为使能软件输入位。SSI位为设置内部管脚电平位。同理通过设置SSM和SSI位1和0则此时的NSS管脚为软件输入模式但内部管脚提供的电平为0。若从设备是一个其他的带有spi接口的芯片,并不能选择NSS管脚的方式,则可以有两种办法,一种是将NSS管脚直接接低电平。另一种就是通过主设备的任何一个gpio口去输出低电平选中从设备。 硬件输入: 主机接高电平,从机接低电平。 左键对应的软件片选引脚,选择GPIO_Output(输出模式),然后点击GPIO,设置一下备注。 我这里虽然PB12是SPI2的硬件片选NSS,但是我想用软件片选,所以关闭了硬件NSS
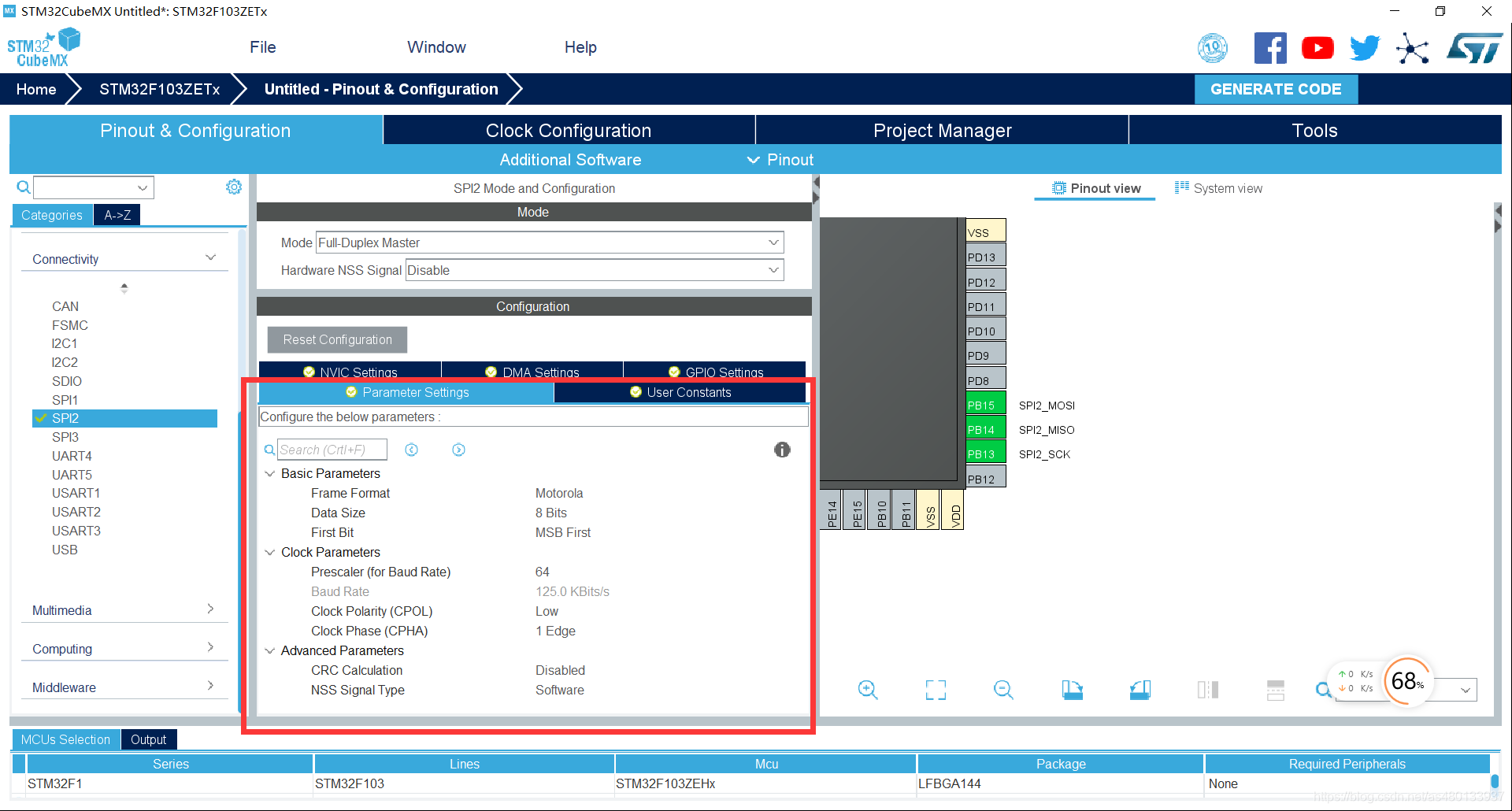
SPI配置默认如下: SPI配置中设置数据长度为8bit,MSB先输出分频为64分频,则波特率为125KBits/s。其他为默认设置。 Motorla格式,CPOL设置为Low,CPHA设置为第一个边沿。不开启CRC检验,NSS为软件控制。
最后记得初始化一下串口,因为需要测试例程,发送数据到上位机。很简单,这里就不再赘述了,不懂得同学请看: 【STM32】HAL库 STM32CubeMX教程四—UART串口通信详解
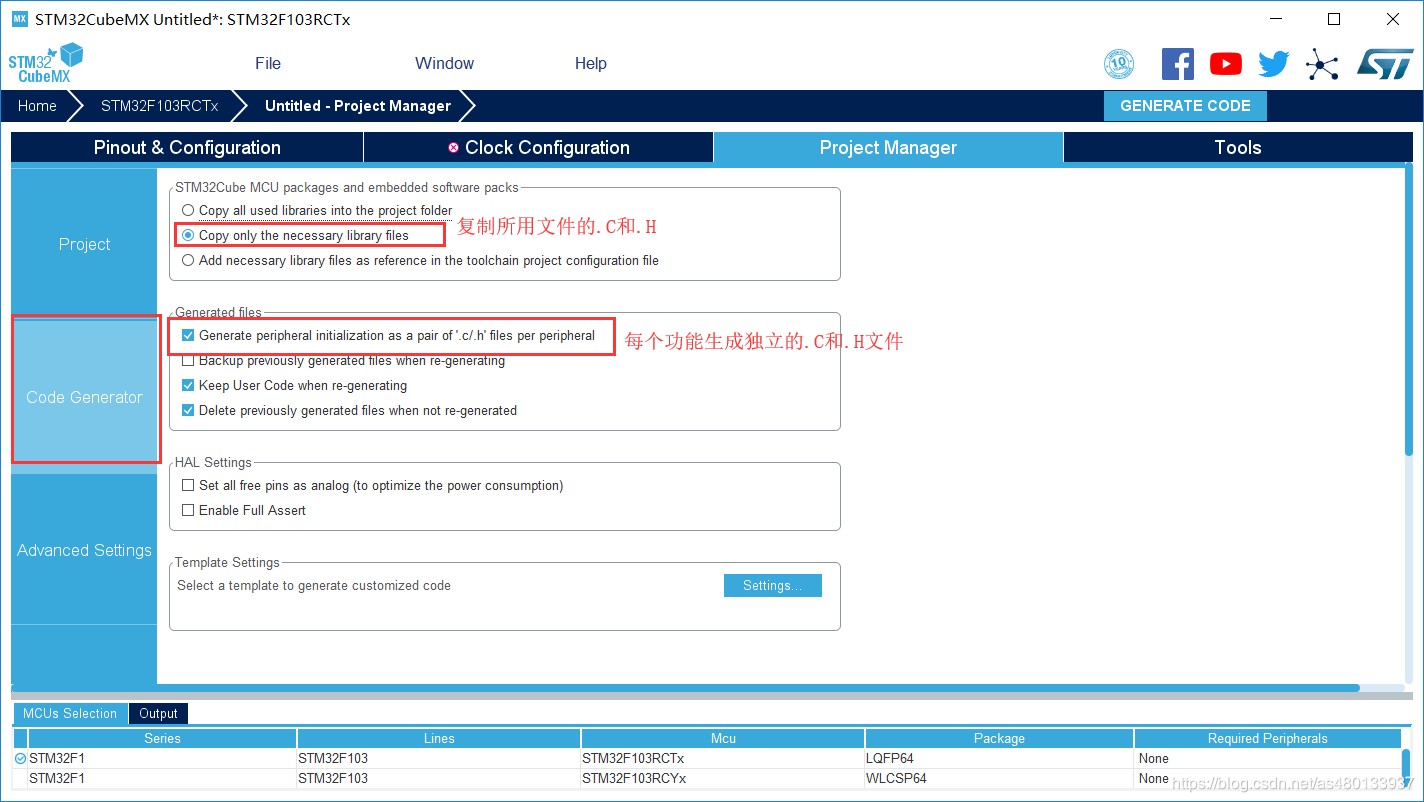
32的时钟树框图 如果不懂的话请看《【STM32】系统时钟RCC详解(超详细,超全面)》 4项目文件设置
然后点击GENERATE CODE 创建工程 配置下载工具 新建的工程所有配置都是默认的 我们需要自行选择下载模式,勾选上下载后复位运行
在stm32f1xx_hal_spi.h头文件中可以看到spi的操作函数。分别对应轮询,中断和DMA三种控制方式。
利用SPI接口发送和接收数据主要调用以下两个函数: HAL_StatusTypeDef HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据 HAL_StatusTypeDef HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//接收数据SPI发送数据函数: HAL_SPI_Transmit(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//发送数据参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2*pData : 需要发送的数据,可以为数组Size: 发送数据的字节数,1 就是发送一个字节数据Timeout: 超时时间,就是执行发送函数最长的时间,超过该时间自动退出发送函数SPI接收数据函数: HAL_SPI_Receive(SPI_HandleTypeDef *hspi, uint8_t *pData, uint16_t Size, uint32_t Timeout);//接收数据参数: *hspi: 选择SPI1/2,比如&hspi1,&hspi2*pData : 接收发送过来的数据的数组Size: 接收数据的字节数,1 就是接收一个字节数据Timeout: 超时时间,就是执行接收函数最长的时间,超过该时间自动退出接收函数SPI接收回调函数: HAL_SPI_TransmitReceive_IT(&hspi1, TXbuf,RXbuf,CommSize);当SPI上接收出现了 CommSize个字节的数据后,中断函数会调用SPI回调函数: HAL_SPI_TxRxCpltCallback(SPI_HandleTypeDef *hspi)用户可以重新定义回调函数,编写预定功能即可,在接收完成之后便会进入回调函数 片选引脚: 因为我们是软件使能片选,定义片选引脚,CS片选低电平为有效使能, CS片选高电平不使能 这里用两个宏定义来代替 在main.h中有宏定义命名,SPI2_CS_Pin 就是PB12 //以W25Q128为例 #define SPI_CS_Enable() HAL_GPIO_WritePin(GPIOB, SPI2_CS_Pin, GPIO_PIN_RESET) #define SPI_CS_Disable() HAL_GPIO_WritePin(GPIOB, SPI2_CS_Pin, GPIO_PIN_SET) SPI例程详解因为不同的flash芯片通信协议以及方式都是不同的,所以这里介绍下具体的SPI的发送和接收应该怎么写,具体的请看芯片手册修改下即可,这里提供下W25QXX的驱动文件,以及测试例程,测试是正常没问题 挑几个函数讲解一下: 在w25Qxx.h钟可以修改CS片选引脚,W25Qx_Enable(),W25Qx_Disable()分别为使能和失能SPI设备,即拉低和拉高/CS电平 #define W25Qx_Enable() HAL_GPIO_WritePin(SPI2_CS_GPIO_Port, SPI2_CS_Pin, GPIO_PIN_RESET) #define W25Qx_Disable() HAL_GPIO_WritePin(SPI2_CS_GPIO_Port, SPI2_CS_Pin, GPIO_PIN_SET)w25Qxx复位函数: 函数开始先将要发送的数据(命令(0x66)和地址(0x99))存储在cmd数组中,拉低片选信号,开始SPI通信然后后通过HAL_SPI_Transmit()函数发送出去拉高片选信号,关闭SPI通信W25Qx_TIMEOUT_VALUE是最大超时时间,在w25Qxx.h中定义为1000,单位为us W25QXX读函数: 三个参数: pData 存放读取到的数据的数组ReadAddr 读取数据的地址Size 读取数据的大小… 函数开始先将要发送的数据(命令和地址)存储在cmd数组中,拉低片选信号,开始SPI通信然后后通过HAL_SPI_Transmit()函数发送出去,首先发送写命令(0X03),上方有讲解,然后发送三个字节(24 Bit)的地址接着通过HAL_SPI_Receive()接收读取的数据。拉高片选信号,关闭SPI通信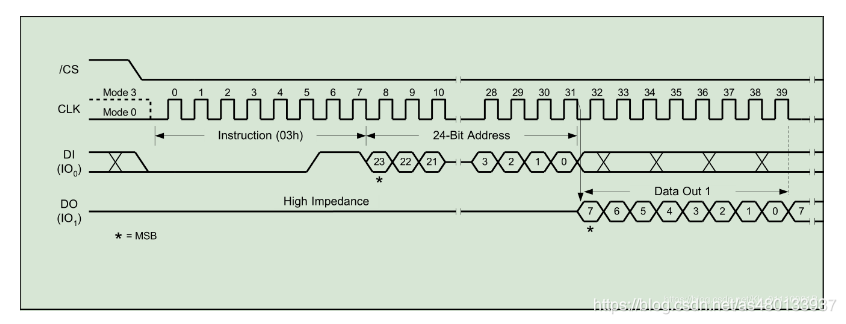 uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
{
uint8_t cmd[4];
/* Configure the command */
cmd[0] = READ_CMD;
cmd[1] = (uint8_t)(ReadAddr >> 16);
cmd[2] = (uint8_t)(ReadAddr >> 8);
cmd[3] = (uint8_t)(ReadAddr);
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi2, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
if (HAL_SPI_Receive(&hspi2, pData,Size,W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
return W25Qx_OK;
}
uint8_t BSP_W25Qx_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
{
uint8_t cmd[4];
/* Configure the command */
cmd[0] = READ_CMD;
cmd[1] = (uint8_t)(ReadAddr >> 16);
cmd[2] = (uint8_t)(ReadAddr >> 8);
cmd[3] = (uint8_t)(ReadAddr);
W25Qx_Enable();
/* Send the read ID command */
HAL_SPI_Transmit(&hspi2, cmd, 4, W25Qx_TIMEOUT_VALUE);
/* Reception of the data */
if (HAL_SPI_Receive(&hspi2, pData,Size,W25Qx_TIMEOUT_VALUE) != HAL_OK)
{
return W25Qx_ERROR;
}
W25Qx_Disable();
return W25Qx_OK;
}
写使能(Write Enable) (06h)
向FLASH发送0x06 写使能命令即可开启写使能,首先CS片选拉低,控制写入字节函数写入命令,CS片选拉高。 uint8_t BSP_W25Qx_WriteEnable(void) { uint8_t cmd[] = {WRITE_ENABLE_CMD}; uint32_t tickstart = HAL_GetTick(); /*Select the FLASH: Chip Select low */ W25Qx_Enable(); /* Send the read ID command */ HAL_SPI_Transmit(&hspi2, cmd, 1, W25Qx_TIMEOUT_VALUE); /*Deselect the FLASH: Chip Select high */ W25Qx_Disable(); /* Wait the end of Flash writing */ while(BSP_W25Qx_GetStatus() == W25Qx_BUSY); { /* Check for the Timeout */ if((HAL_GetTick() - tickstart) > W25Qx_TIMEOUT_VALUE) { return W25Qx_TIMEOUT; } } return W25Qx_OK; }扇区擦除函数: 扇区擦除指令(Sector Erase) (0x20h) 下载地址: w25Qxx.zip 例程测试重新定义printf函数 在 stm32f1xx_hal.c中包含#include #include "stm32f4xx_hal.h" #include extern UART_HandleTypeDef huart1; //声明串口在 stm32f1xx_hal.c 中重写fget和fput函数 /** * 函数功能: 重定向c库函数printf到DEBUG_USARTx * 输入参数: 无 * 返 回 值: 无 * 说 明:无 */ int fputc(int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff); return ch; } /** * 函数功能: 重定向c库函数getchar,scanf到DEBUG_USARTx * 输入参数: 无 * 返 回 值: 无 * 说 明:无 */ int fgetc(FILE *f) { uint8_t ch = 0; HAL_UART_Receive(&huart1, &ch, 1, 0xffff); return ch; } main.c在main.c里添加以下代码: #include #include "W25QXX.h" uint8_t wData[0x100]; uint8_t rData[0x100]; uint32_t i; uint8_t ID[2]; printf("\r\n SPI-W25Qxxx Example \r\n\r\n"); /*##-1- Read the device ID ########################*/ BSP_W25Qx_Init(); BSP_W25Qx_Read_ID(ID); printf(" W25Qxxx ID is : 0x%02X 0x%02X \r\n\r\n",ID[0],ID[1]); /*##-2- Erase Block ##################################*/ if(BSP_W25Qx_Erase_Block(0) == W25Qx_OK) printf(" SPI Erase Block ok\r\n"); else Error_Handler(); /*##-3- Written to the flash ########################*/ /* fill buffer */ for(i =0;i |
 SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。
SPI只有主模式和从模式之分,没有读和写的说法,外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。也就是说,你发一个数据必然会收到一个数据;你要收一个数据必须也要先发一个数据。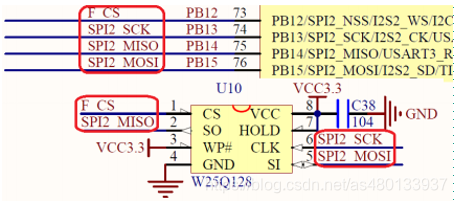 常用指令:
常用指令: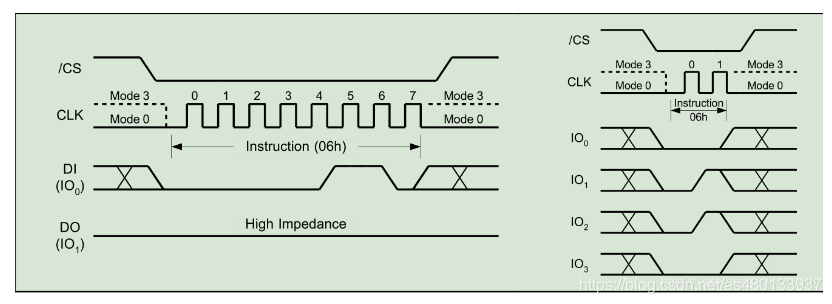
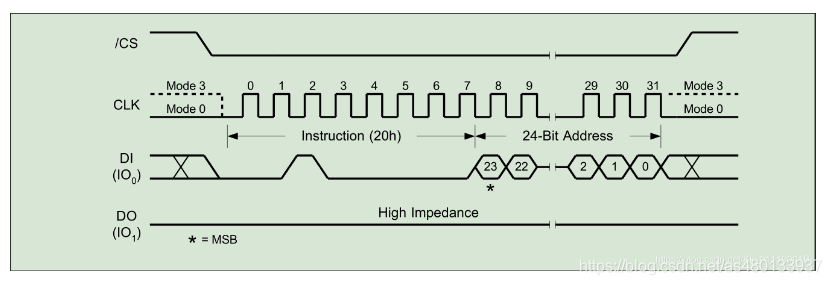 扇区擦除指令,数据写入前必须擦除对应的存储单元,该指令先拉低/CS引脚电平,接着传输“20H”指令和要24位要擦除扇区的地址。
扇区擦除指令,数据写入前必须擦除对应的存储单元,该指令先拉低/CS引脚电平,接着传输“20H”指令和要24位要擦除扇区的地址。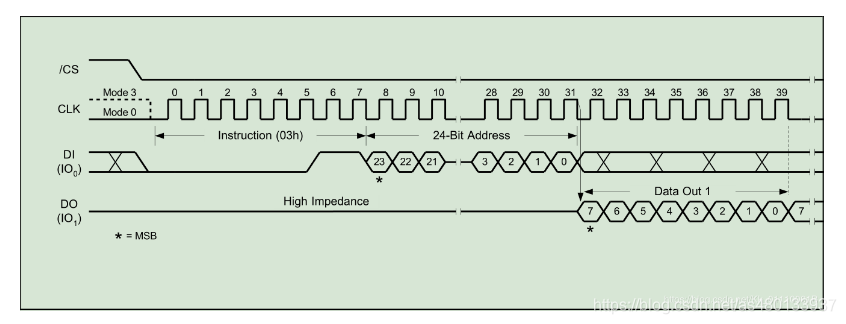


 模式设置:
模式设置: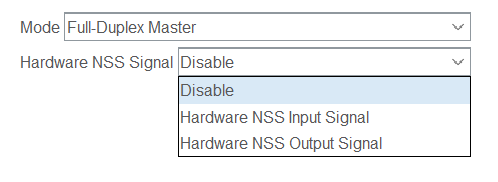
 3时钟源设置
3时钟源设置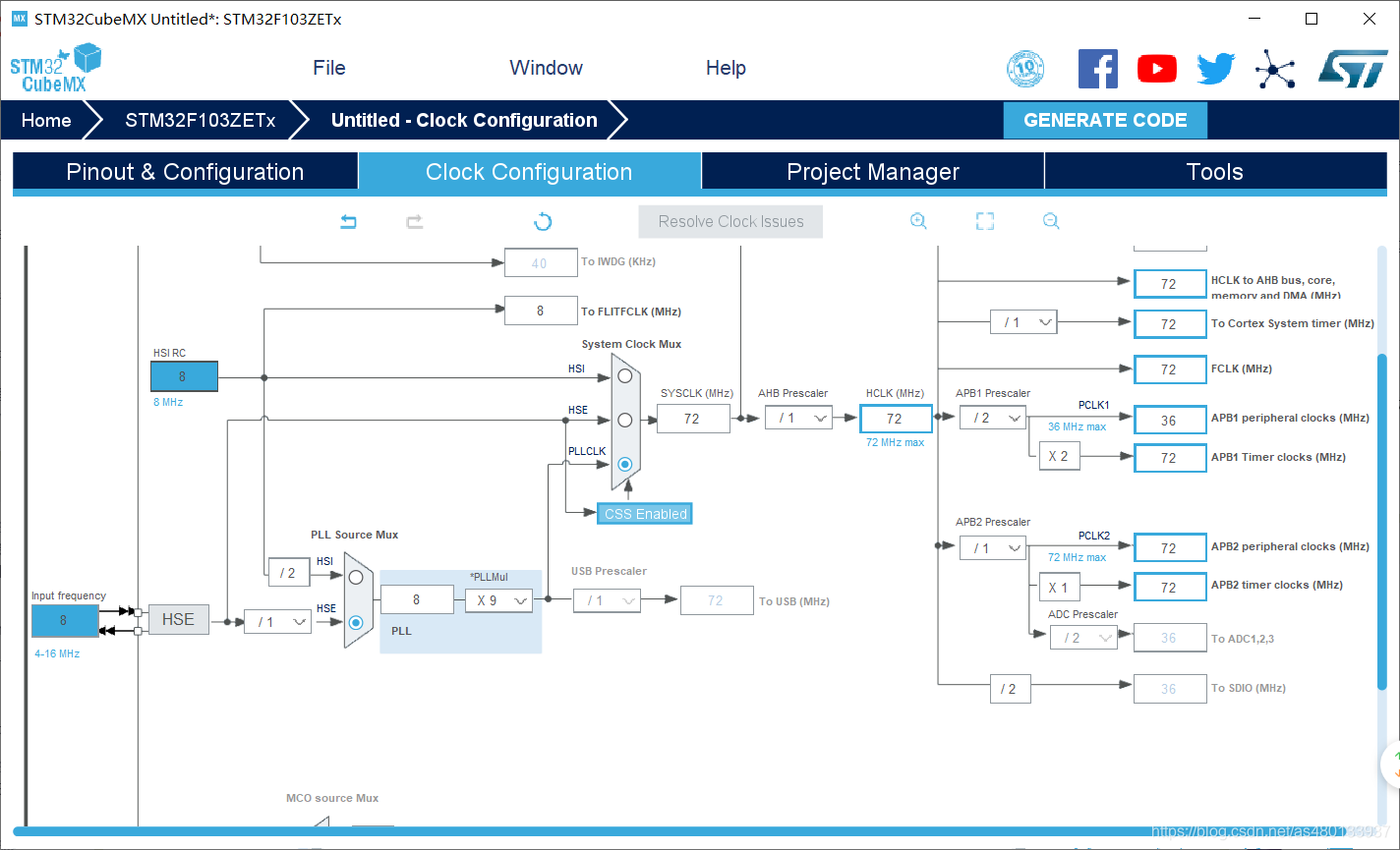 我的是 外部晶振为8MHz
我的是 外部晶振为8MHz
 5创建工程文件
5创建工程文件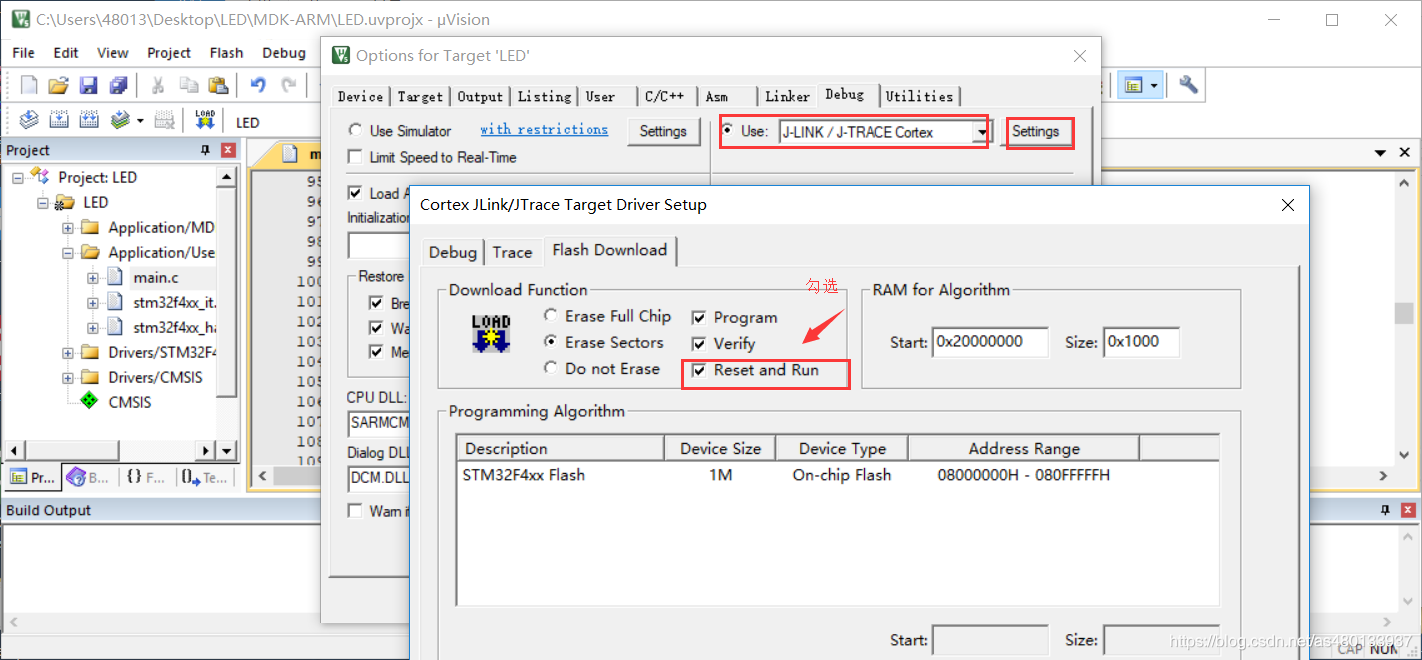


【本文地址】
今日新闻 |
推荐新闻 |